Hiwi (Student Assistant Researcher) in KI Fabrik
Published:
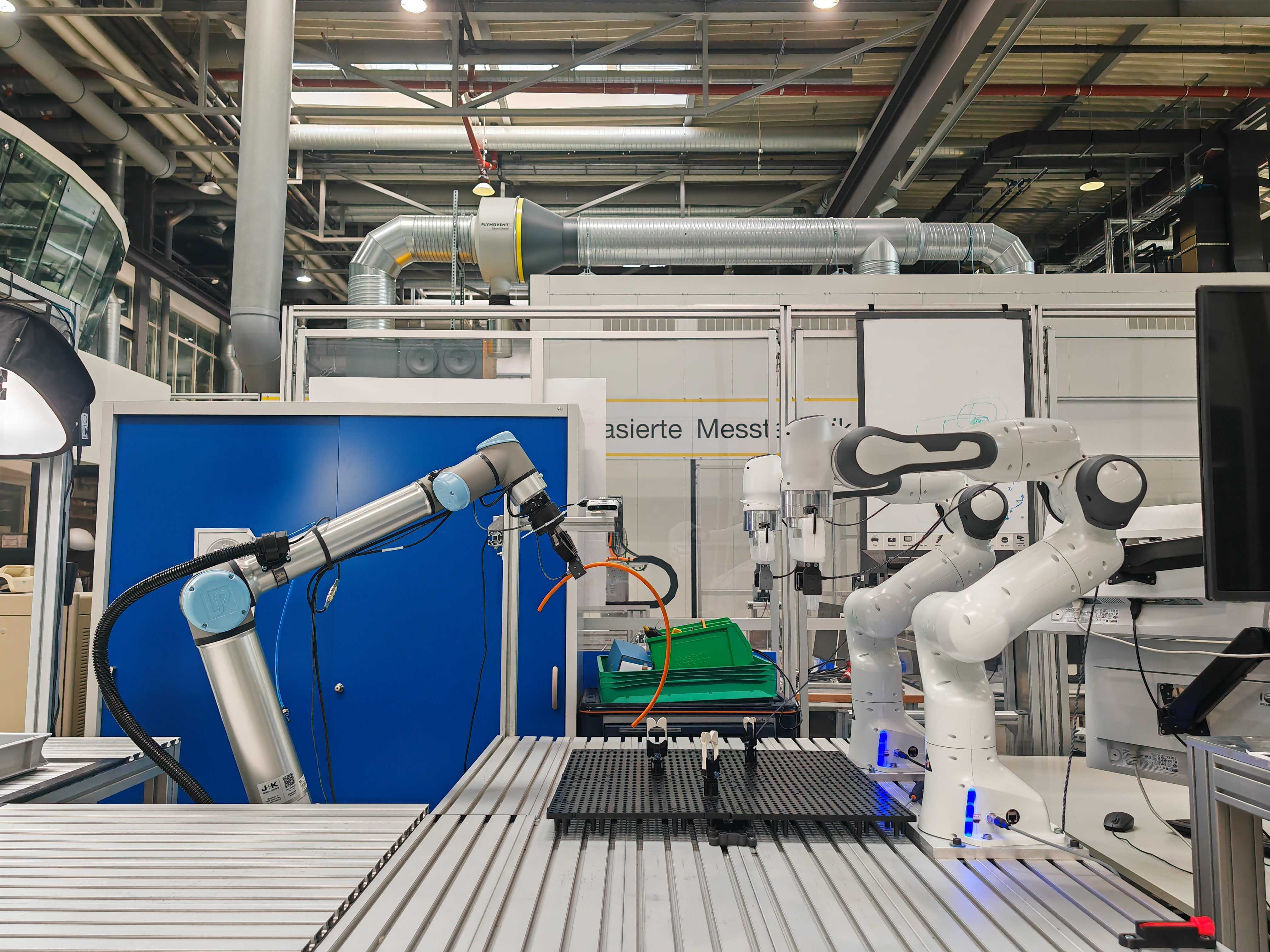
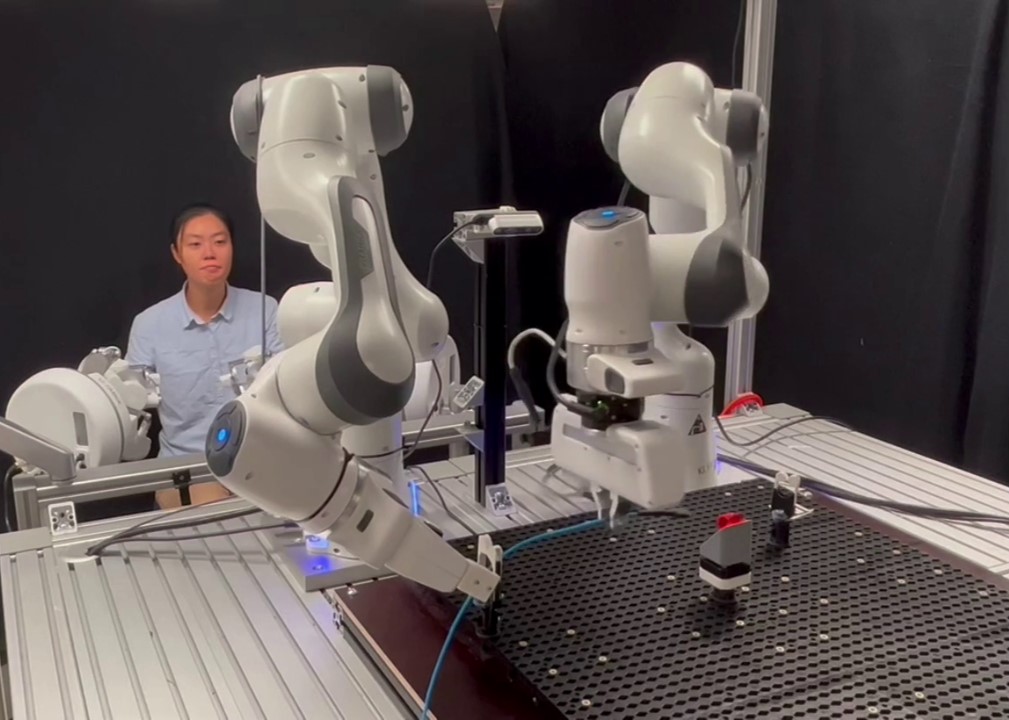
My work focuses on collecting multi-modal human demonstration data for Large Language Model (LLM) skill planning, developing skill-based robot control in MIOS, integrating haptic sensing for object state estimation, implementing robot vision systems, and contributing to deformable linear object assembly research.